KFTC基于深度学习的ADAS软件算法可检测车辆、行人、车道和交通标志等物体。目前正在进一步改进,以使可靠性达到100%。
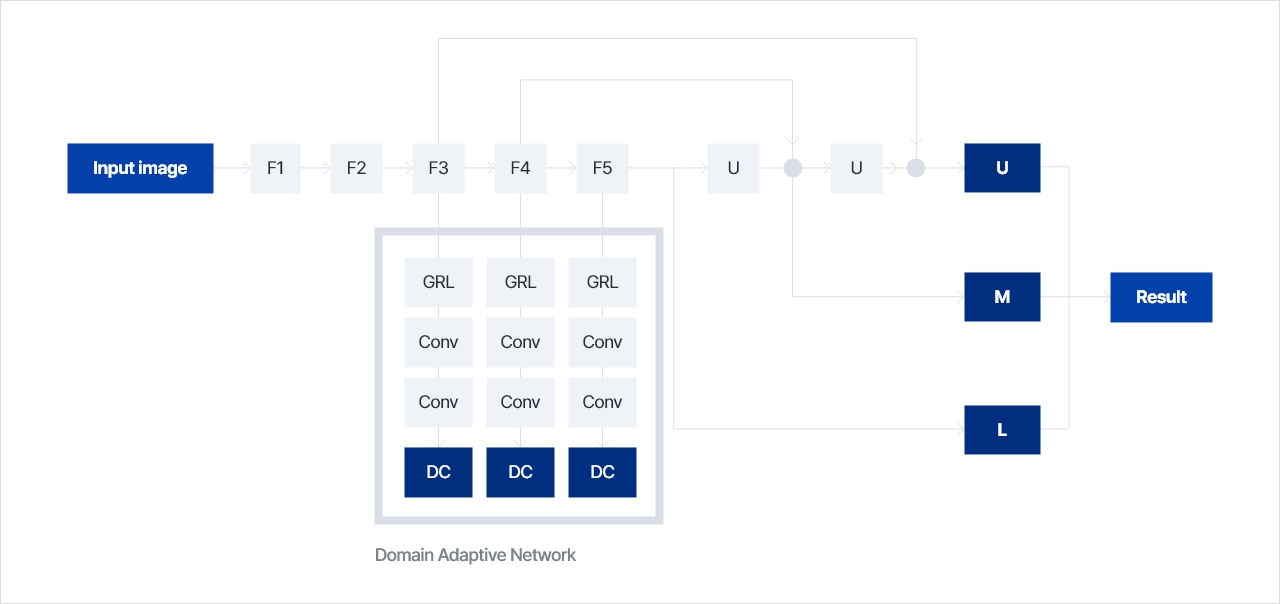
领域自适应平衡白天和夜间数据之间的分布,以补充不利光照和天气条件下的图像。
这种平衡的数据分布使得能够利用白天数据更好地检测夜间物体,而通常需要增加夜间数据量来提高性能。
夜间图像增强算法将不利条件下的图像数据转化为便于物体检测的特征,并将其用于基础网络的训练。


Leave A Comment